
本文件提供 MATRIX Mini R4 機器人的 Blockly 視覺化編程積木完整API參考。
功能說明: 初始化 MATRIX Mini 開發板的基本設定。此積木應該放在程式開始處。這是一個 HAT(帽子)積木。 所有除事件、自訂函數外的主要代碼應該放在此處,其概念與Arduino的Setup、Loop相同。
註:請勿在程式畫面中放置多個此方塊,將導致功能異常。
使用方式:

功能說明: 讀取板載按鈕的狀態。
回傳值:
true:按鈕被按下false:按鈕未被按下
功能說明: 讀取電源輸入電壓值(單位:伏特)。
回傳值:

功能說明: 讀取指定數位腳位的輸入狀態。
參數:
回傳值:
HIGH (1):高電位LOW (0):低電位
功能說明: 設定指定數位腳位的輸出狀態。
參數:

功能說明: 讀取指定類比腳位的數值。
參數:
回傳值:

功能說明: 設定直流馬達的旋轉方向。
參數:

功能說明: 設定編碼器馬達的脈衝數(PPR)和額定轉速(RPM)參數。
參數:
說明:
PPR 值取決於使用的編碼器馬達規格,常見馬達參考數值:
RPM 值用於速度控制計算,常見馬達參考數值:

功能說明: 設定馬達功率(PWM)並開始運轉。
參數:

功能說明: 設定馬達速度並開始運轉,但通過Encoder實時計算速度,並利用PID進行穩定的速度控制。
參數:

功能說明: 停止馬達並進行煞車。
參數:

功能說明: 將編碼器計數值歸零。
參數:

功能說明: 讀取編碼器的當前計數值。
參數:
回傳值:

功能說明: 設定 RC 伺服馬達的旋轉方向。
參數:

功能說明: 設定 RC 伺服馬達的角度位置。
非阻塞函數,程式會立刻繼續向下執行,必要時請手動添加延遲(delay)
參數:
本分類提供了機器人移動的高階控制積木,包含同步控制、陀螺儀輔助等功能。

功能說明:
如使用非MATRIX馬達,使用前請先通過馬達方塊配置好PPR、RPM、方向等資訊。
配置左右馬達及其反轉設定,用於差動驅動機器人。
參數:

功能說明: 設定 PID 控制器的參數,用於移動同步或陀螺儀控制。
參數:
調整建議:
預設PID數值(Kp, Ki, Kd)參考:
MoveSync:
MoveGyro:
TurnGyro:

功能說明: 控制機器人移動指定的距離或角度。
參數:

功能說明: 使用 PID 同步控制,使左右輪保持一致的移動。
參數:
特點:

功能說明: 使用陀螺儀感測器輔助,保持直線移動。
參數:
特點:

功能說明: 啟動連續移動,直到停止指令。*功率為PWM輸出,無PID速控,適合搭配用戶自己寫的循線或其他算法(如PID)使用
參數:

功能說明: 使用 PID 同步控制的連續移動。
參數:

功能說明: 使用陀螺儀輔助的連續直線移動。
參數:

功能說明: 控制機器人轉向指定角度,可設定轉彎速度。使用陀螺儀之Yaw Heading來進行轉向角度偵測。
參數:
特點:

功能說明: 控制機器人轉向指定角度,可設定轉彎速度。使用陀螺儀之Yaw Heading來進行轉向角度偵測。
參數:

功能說明: 讀取馬達從上次重置後累積轉動的角度值,可用於計算行駛距離。 其計算方法為 (abs(leftMotorDegs) + abs(rightMotorDegs)) / 2。 註: 與原有馬達之Encoder角度計算不衝突。
回傳值:

功能說明: 將底盤累積角度重置為零,用於重新開始距離計算。建議在需要精確測量距離前先執行重置。 註: 與原有馬達之Encoder角度計算不衝突。

功能說明: 停止機器人移動。 煞車方法:Brake為通過馬達H橋驅動晶片加速停車、Coast為鬆油門滑行、Hold為PID煞車確保角度穩定(尚未推出)

功能說明: 設定板載 RGB LED 的顏色。
參數:

功能說明: 以指定頻率和音量播放音調。
非阻塞函數,程式會立刻繼續向下執行,必要時請手動添加延遲(delay)
參數:

功能說明: 播放預定義的音符。
非阻塞函數,程式會立刻繼續向下執行,必要時請手動添加延遲(delay)
參數:

功能說明: 停止蜂鳴器播放。

功能說明: 清除 OLED 顯示器的所有內容。

功能說明: 在 OLED 螢幕的指定位置顯示文字。
參數:

功能說明: 設定 OLED 顯示的文字大小。
參數:

功能說明: 設定 OLED 顯示的文字顏色。
參數:

功能說明: 透過 USB 序列埠輸出文字,不自動換行。
參數:

功能說明: 透過 USB 序列埠輸出文字,並自動換行。
參數:

功能說明: 透過 USB 序列埠寫入原始位元組資料。
參數:

功能說明: 以特定格式輸出三軸感測器資料,方便軟體右下角的 Serial Plotter 圖表顯示。
參數:

功能說明: 檢查序列埠緩衝區是否有可讀取的資料。
回傳值:

功能說明: 從序列埠讀取一個字元。
回傳值:

功能說明: 更新 MJ2(PS2) 手把的狀態資料。應該放在主迴圈中定期執行。
**MJ2手把的連接方式指南:
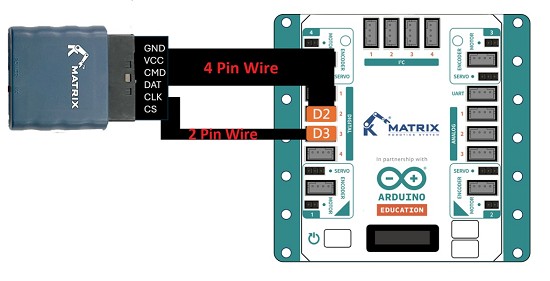

功能說明: 讀取 MJ2(PS2) 手把的按鈕狀態。
如何連接MJ2手把?請向上滑動至"MJ2 手把輪詢"小節,有連接指南。
參數:
回傳值:
true:按鈕被按下false:按鈕未被按下
功能說明: 讀取 MJ2(PS2) 手把搖桿的類比數值。
如何連接MJ2手把?請向上滑動至"MJ2 手把輪詢"小節,有連接指南。
參數:
回傳值:

功能說明: 重置板載 IMU(慣性測量單元)的數值。

功能說明: 讀取加速度感測器數值。
參數:
回傳值:

功能說明: 讀取陀螺儀角速度。
參數:
回傳值:

功能說明: 讀取姿態角度(Roll、Pitch、Yaw)。
參數:
回傳值:

功能說明: 讀取 MATRIX 灰階感測器數值。
參數:
回傳值:

功能說明: 讀取 MATRIX 電位器(旋鈕)數值。
參數:
回傳值:

功能說明: 讀取 MATRIX 水位感測器數值。
參數:
回傳值:

功能說明: 讀取 MATRIX 土壤濕度感測器數值。
參數:
回傳值:

功能說明: 讀取 MATRIX 微動開關狀態。
參數:
回傳值:
true:開關被觸發false:開關未觸發
功能說明: 讀取 MATRIX PIR 人體紅外線感測器狀態。
參數:
回傳值:
true:偵測到人體移動false:未偵測到移動
功能說明: 更新 DHT 溫濕度感測器的讀數。
參數:

功能說明: 讀取 DHT 感測器的溫度或濕度。
參數:
回傳值:

功能說明: 讀取 DS18B20 溫度感測器數值。
參數:
回傳值:

功能說明: 初始化 MATRIX 顏色感測器 V2 版本。
參數:
注意:V1, V2與V3硬體不相容,請注意使用的硬體版本與程式


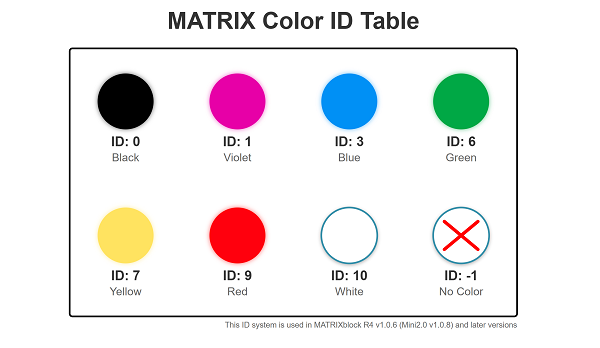
功能說明: 讀取 MATRIX 顏色感測器 V2 的顏色辨識結果。
參數:
回傳值:
Color ID對應編號表:

功能說明: 初始化 MATRIX 顏色感測器 V3 版本。
參數:
注意:V1, V2與V3硬體不相容,請注意使用的硬體版本與程式

功能說明: 讀取 MATRIX 顏色感測器 V3 的 RGB 或 HSV 數值。
參數:
回傳值:
Color ID對應編號表:

功能說明: 初始化 MATRIX 雷射測距感測器 V1 版本。
參數:
注意:V1與V2硬體不相容,請注意使用的硬體版本與程式


功能說明: 讀取 MATRIX 雷射測距感測器 V1 的距離。
參數:
回傳值:

功能說明: 初始化 MATRIX 雷射測距感測器 V2 版本。
參數:
注意:V1與V2硬體不相容,請注意使用的硬體版本與程式

功能說明: 讀取 MATRIX 雷射測距感測器 V2 的距離。
參數:
回傳值:

功能說明: 初始化 MATRIX 手勢感測器。
參數:

功能說明: 讀取 MATRIX 手勢感測器辨識的手勢。
參數:
回傳值:

功能說明: 判斷手勢感測器是否偵測到特定手勢。
參數:
回傳值:
true 或 false
功能說明: 初始化 MVision 視覺感測器(透過 UART)。

功能說明: 讀取 MVision 視覺感測器的辨識結果。

功能說明: 取得 MVision 視覺感測器的特定資料欄位。
參數:
回傳值:

功能說明: 初始化 HuskyLens AI 視覺感測器(透過 UART,Baud Rate 9600)。
註:切勿直接使用原裝的JST to JST線材直接連接HuskyLens Camera,由於腳位定義不同需要跳線!
註:MATRIX UART 腳位由左至右為 (TX, RX, V, G)

功能說明: 讀取 HuskyLens 的辨識結果。

功能說明: 取得 HuskyLens 辨識的方塊(物體)資訊。
參數:
回傳值:

功能說明: 取得 HuskyLens 辨識的箭頭(線條)資訊。
參數:
回傳值:

功能說明: 判斷 HuskyLens 是否偵測到物體。
回傳值:
true 或 false
功能說明: 初始化 MATRIX 10 通道循線感測器。
參數:

功能說明: 控制循線感測器的校準程序。
參數:
使用說明:

功能說明: 讀取指定通道的感測器數值。
參數:
回傳值:

功能說明: 取得循線感測器的誤差值或線位置。
參數:
回傳值:

功能說明: 查詢循線感測器的狀態。
參數:
回傳值:
true 或 false
功能說明: 設定感測器 S6-S10 的權重值,用於計算誤差。
參數:
說明:

功能說明: 設定感測器的黑線判斷閾值。
參數:
說明:

功能說明: 初始化 HiTechnic 顏色感測器。
參數:

功能說明: 讀取 HiTechnic 顏色感測器的數值。
參數:
回傳值:

功能說明: 讀取 DHT11 溫濕度感測器數值。
參數:
回傳值:

功能說明: 讀取 DS18B20 防水溫度感測器。
參數:
回傳值:

功能說明: 讀取 Grove 超音波測距感測器距離。
參數:
回傳值:

功能說明: 讀取標準 HC-SR04 超音波感測器距離。
參數:
回傳值:

功能說明: 重置計時器,從 0 開始計時。

功能說明: 讀取計時器經過的時間。
回傳值:

功能說明: 連接到 WiFi 網路(僅2.4GHz)。
參數:
說明:

功能說明: 檢查 WiFi 連線狀態。
回傳值:
true:已連線false:未連線
功能說明: 取得裝置的本地 IP 位址。
回傳值:

功能說明: 設定裝置使用固定 IP 位址。
參數:
範例:

功能說明: 將裝置設為 WiFi 熱點(AP 模式)。
參數:

功能說明: 初始化藍牙低功耗(BLE)功能。

功能說明: 設定 BLE 裝置的廣播名稱。
參數:

功能說明: 啟用 Nordic UART Service,用於 BLE 序列通訊,較接近以往HC-05的使用方式。

功能說明: 更新 BLE 連線狀態和資料。應該放在主迴圈中定期執行。

功能說明: 檢查 BLE 是否有裝置連線。
回傳值:
true:已連線false:未連線
功能說明: 透過 BLE UART 發送訊息。(單次最高128字節)
參數:

功能說明: 當 BLE 收到資料時執行內部程式碼。這是一個 HAT(帽子)積木。
註:請勿在程式畫面中放置多個此方塊,將導致功能異常。
使用方式:
當 BLE 收到資料時
顯示 BLE 接收到的資料

功能說明: 取得 BLE 接收到的資料內容。(單次最高128字節)
回傳值:

功能說明: 連線到 MQTT Broker。
參數:
常用免費測試的 Broker:
電腦上可以用來測試MQTT服務的免費網站:

功能說明: 維護 MQTT 連線並處理訊息。應該放在主迴圈中定期執行。

功能說明: 訂閱 MQTT 主題以接收訊息。
參數:
範例:

功能說明: 向 MQTT 主題發佈訊息。
參數:

功能說明: 當 MQTT 收到訂閱主題的訊息時執行內部程式碼。這是一個 HAT(帽子)積木。
註:請勿在程式畫面中放置多個此方塊,將導致功能異常。
使用方式:
當 MQTT 收到訊息時
如果 MQTT 接收到的主題 = "robot/cmd"
顯示 MQTT 接收到的訊息

功能說明: 取得 MQTT 訊息的來源主題。
回傳值:

功能說明: 取得 MQTT 訊息的內容。
回傳值:

功能說明: 檢查 MQTT 是否連線中。
回傳值:
true:已連線false:未連線
功能說明: 暫停程式執行指定時間。
參數:

功能說明: 條件判斷,當條件為真時執行內部程式。
使用方式:
如果 溫度 > 30
開啟風扇

功能說明: 條件判斷,根據條件執行不同程式。
使用方式:
如果 按鈕被按下
LED 亮紅燈
否則
LED 亮綠燈

功能說明: 重複執行內部程式指定次數。
參數:
使用方式:
重複執行 10 次
閃爍 LED

功能說明: 無限重複執行內部程式,直到程式停止。
使用方式:
無限重複
讀取感測器
更新顯示

功能說明: 暫停程式執行,直到條件為真。
使用方式:
等待直到 按鈕被按下
執行任務

功能說明: 重複執行內部程式,直到條件為真。
使用方式:
重複直到 距離 < 10
前進
煞車

功能說明: 取得程式開始執行後經過的毫秒數。
回傳值:
用途:

功能說明: 將數值從一個範圍映射到另一個範圍。
參數:
範例:

功能說明: 限制數值在指定範圍內。
因為方式constrain()底層設計原因,請避免在括號內使用變數與常數以外的資料,否則可能導致錯誤的結果。
參數:
範例:

功能說明: 計算兩個數值的和。

功能說明: 計算兩個數值的差。

功能說明: 計算兩個數值的積。

功能說明: 計算兩個數值的商。

功能說明: 產生指定範圍內的隨機整數。
參數:

功能說明: 設定隨機數產生器的種子值。
參數:
用途:

功能說明: 判斷第一個數值是否小於第二個數值。
回傳值:
true 或 false
功能說明: 判斷兩個數值是否相等。(也可用於字串比較)
回傳值:
true 或 false
功能說明: 判斷第一個數值是否大於第二個數值。
回傳值:
true 或 false
功能說明: 提供 true 或 false 布林常數。

功能說明: 邏輯 AND 運算,兩個條件都為真時回傳真。
回傳值:
true 或 false
功能說明: 邏輯 OR 運算,至少一個條件為真時回傳真。
回傳值:
true 或 false
功能說明: 邏輯 NOT 運算,反轉布林值。
回傳值:
true 或 false
功能說明: 連接兩個字串。
範例:

功能說明: 連接三個字串。

功能說明: 取得字串中指定位置的字元。
參數:
回傳值:

功能說明: 取得字串的長度。
回傳值:

功能說明: 將數值轉換為字串。

功能說明: 將字串轉換為浮點數。

功能說明: 計算除法的餘數。
範例:

功能說明: 將數值四捨五入到最接近的整數。

功能說明: 執行進階數學運算。
選項:
變數分類提供了建立和管理變數的功能。
點擊「建立變數」按鈕可以建立新的變數。
將數值存入變數中。
取得變數中儲存的數值。
將變數的值增加指定數量。
自訂積木分類允許您建立可重複使用的程式區塊。
建立後,自訂積木會出現在此分類中,可以像使用其他積木一樣拖曳使用。
為僅供自訂積木內使用的數字區域變數
為僅供自訂積木內使用的字串區域變數
為僅供自訂積木內使用的布林值區域變數
版本資訊: